Création d’un moteur de détection automatique d’objets ponctuels dans un base de données de scanner dynamique
Méthode de reconnaissance d’extraction et de positionnement de candélabres et de panneaux de signalisation dans un nuage de points
Arthur Picard
Approfondissement d’un précédent article du même auteur, l’objectif de l’étude porte sur la démonstration de la réduction des durées d’acquisition des données cartographiques grâce à l’innovation technologique.
L’utilisation des techniques de cartographie mobile en milieu urbain, précisément en ce qui concerne la signalisation de l’espace public procure un gain de temps considérable, d’autant que les solutions commercialisées à l’heure actuelle sont souvent peu modulables.
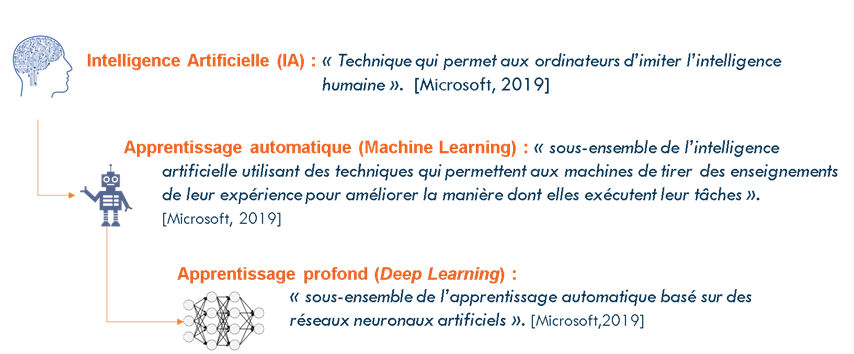
Comme l’illustre le graphique joint, l’intelligence artificielle, le machine Learning et le Deep Learning permettent aujourd’hui d’aller plus loin et plus vite pour reconnaître et extraire le « signifiant » des données pour l’exploiter habilement.
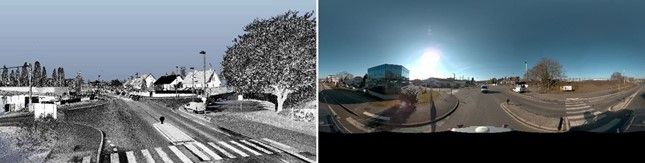
Par une méthode de reconnaissance d’extraction et de positionnement de candélabres et de panneaux de signalisation dans un nuage de points, basée sur une extraction de la sémantique d’images panoramiques, on peut créer un moteur de détection. Celui-ci passe par les étapes suivantes :
- Choix d’une approche de reconnaissance
- Reconnaissance d’objets dans l’imagerie panoramique
- Mise en correspondance avec le nuage de points
- Filtrage des points extraits du nuage
- Calcul du point d’insertion
Article d'Arthur Picard - TTGE 75, publié dans son intégralité dans la revue XYZ de l'Association Française de Topographie n°163 - de Mars 2020
En raison de la crise sanitaire Covid-19, le forum annuel de l'AFT initialement prévu le 5 novembre 2020 est reporté au 6 mai 2021, date de remise officielle des prix de l'AFT.